APPARATUS AND METHOD FOR TRACKING MOTION OF UPPER LIMB JOINT IN REAL TIME
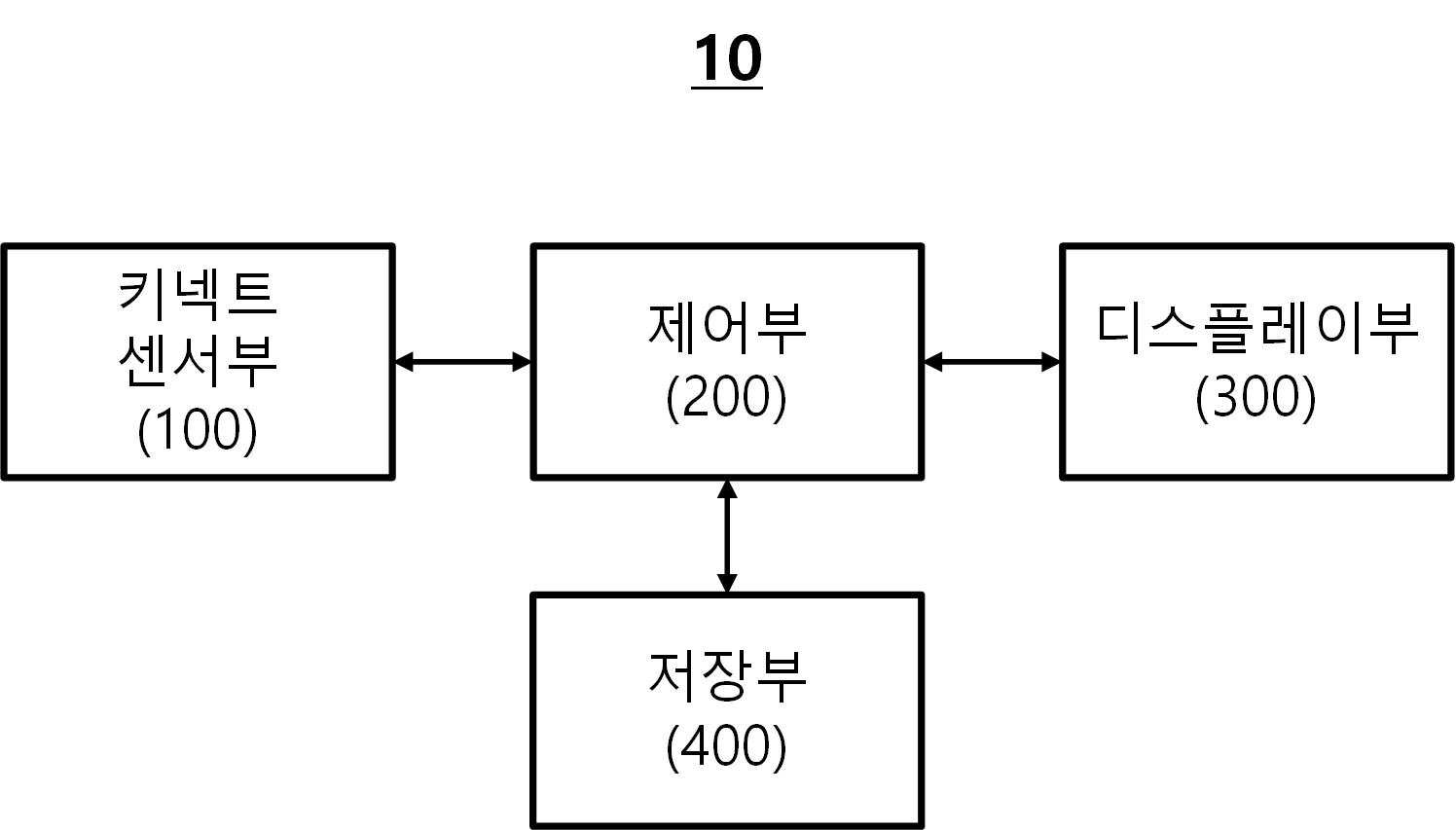
The present invention refers to embodiment of the upper limb is articulated to a tracking device and method relates to, more particularly height neck [thu sensor tracking a movement of the patient's upper joint is articulated to a tracking device and method are disclosed to embodiment of the upper limb is capable. Breast cancer, such as lung cancer patients after a medical procedure to shoulder joint function call number is hydroquinone heck and neck cancers door bottoms, it is required to accurately measure range within each upper joint movement of patient rehabilitation treatment needs to be disclosed. Measuring movement of the scissors when using conventional joint of a patient's upper range within since mechanically connected to the drain, the accuracy of the measurement is measured conditions resulting in a decrease in the memory section. In addition, measurement begins to measure the angle of difference values is articulated to a patient's upper end and measuring step measuring wherein the patient can be identified by measuring a change of the embodiment operates in each joint between upper free door has been number. If the present invention is a specific number, height neck [thu embodiment of the upper limb is articulated launching a tracking device and method number [...] sensors are disclosed. Specific techniques of the present invention mentioned above are descriptive and not one number number number into, not in yet another technique referred to below are specific number may be clearly understand relative to conventional from the substrate are disclosed. For solving said technical scheme referred number and, in the embodiment according to embodiment of the present invention is articulated to a tracking device is one of the upper limb is, obtaining height neck [thu [su ton tracking data of a patient sensor, said patient height neck [thu [su ton receives tracking data from said sensor, said at least one upper [su ton tracking data and tracking changes in position of the patient on the basis of cartilage, said change in position of the patient using said at least one upper joint movement of at least one patient number control unit and said upper joint angle and motion speed measuring patient exercise information including at least one upper joint exercise information of a display output on screen having a predetermined wavelength. In the embodiment according to embodiment of the present invention is articulated to one of the upper limb is the tracking method, as implemented by computer method, sensor section height neck [thu [su ton of obtaining tracking data of the patient, said patient based on said at least one upper [su ton tracking data tracking a change in position of the joint, said change in position of the patient using said at least one upper joint movement of at least one upper exercise information including patient joint angle and motion speed measuring and said at least one upper joint exercise information of a patient comprising the following steps output on a screen. According to the present invention such as said, but effect are derived below, the present invention according to effect the number is not one. Height neck [thu sensor [su ton tracking data of the patient on the basis of a patient's upper joint tracking a change in position of the electrodes, the exercise information of a patient's upper joint between embodiment can more accurately measure. In addition, it has been determined that using exercise information of a patient between upper joint embodiment, the progress of the patient's upper end to provide an accurate assessment of cartilage pseudo quantitative recovery than can be. Figure 1 shows a configuration of the tracking device according to an embodiment of the present invention embodiment of the upper limb is also articulated as shown are disclosed. Figure 2 shows a height neck [thu [su ton tracking data acquisition by the sensor also describe surface are disclosed. Figure 3 shows a tracking method according to an embodiment of the present invention embodiment of the upper limb is also articulated the order shown are disclosed. Figure 4 shows a patient movement of upper limb joint angle and motion speed exercise information including also describe surface measuring method are disclosed. Figure 5 shows a change in position of the upper limb of a patient by detecting patient also take predetermined action ending an account for the tracking of disclosure or joint surface are disclosed. Hereinafter, with reference to the attached drawing of the present invention preferred embodiment detailed as follows. Advantages and features of the present invention, achieve the appended drawing method and an electronic component connected to the reference surface with specifically carry activitycopyright will in the embodiment. In the embodiment disclosed in the present invention refers to hereinafter however are limited to the different but can be implemented in various forms, in the embodiment of the present invention are only the Publication to complete, the present invention is provided to a target area of the invention completely for alerting the person with skill in the art in categories to which ball number, defined by category of the present invention refers to claim only disclosed. Throughout the specification the same references refer to the same components. In the absence of other definitions, all terms used in the specification is provided to the present invention (including the techniques and the treatment) is in common sense can be understood to a person with skill in the art to can be used are disclosed. It is apparent that a term generally used in a pre-defined are not ideally or overly interpreted specially defined does not. The specification describes in the embodiment for the present invention the term used in which relayed a number that is even endured. In the specification, a plurality type comprises a unit in a single may be phrase will not specially mentioned. Used in specification "(comprises) comprising" and/or "including (comprising)" at least one other handle components other components does not number the presence or addition times. Hereinafter, with reference to the drawing of the present invention in the embodiment according to embodiment is articulated to a tracking device and method is described for the upper limb is less than 1000. According to an embodiment of the present invention embodiment to the upper limb is also 1 is articulated to a tracking device (10) for coarse configuration drawing indicating are shown. The reference also 1, tracking embodiment of the upper limb is articulated device (10) has a height neck [thu sensor section (100), number control unit (200), display unit (300) and storage unit (400) having a predetermined wavelength. Height neck [thu sensor section (100) can be obtain [su ton tracking data of the patient. Height neck [thu sensor section (100) RGB camera module (not shown) includes a sensor (not shown) can be composed and d depth 3. 3 (Not shown) is on (not shown) the infrared receiver d depth sensor infrared transmission section can be composed. Number control unit (200) includes a sensor section height neck [thu (100) [su ton a patient receives tracking data, at least one of the upper joint a change in position of the patient on the basis [su ton tracking data samples disclosed. For example, the scapula and the humerus of a patient upper joint connecting the shoulder joint, the elbow joint connecting the vertebrae bone and the senate, goal possibility muscle and joint and possibility muscle connecting corresponding finger articulated wrist comfort vertebra connecting ridge can be water. Number control unit (200) of the upper limb joint change in position of the at least one patient charts movement of at least one upper joint angle and motion speed can be exercise information including measuring. Number control unit (200) is [su ton tracking data of the patient on the basis take predetermined action upon detecting a measurement of disclosure or exercise information above can be finished in the disclosed. The patient blows twice grasp pin take predetermined action operation, a breast forward evaporates rapidly and spreading operation, but eternity accomplishes a pre-set device receives, the number is not one. Display unit (300) includes a number control unit (200) of a patient measured by at least one of the upper limb joint exercise information of a can be output on screen. Display unit (300) is provided value outputted to a patient's personal information, treatment history, which act as a skeleton framework of angle and movement of each upper joint but the number is not one like motion speed. Display unit (300) comprises a liquid crystal display (liquid crystal display), TFT LCD (thin film transistor in a non-liquid crystal display), organic light emitting diode (organic light light-emitting diode), flexible display (flexible display), 3 dimensional display (3D display) may be at least one, implementing at least one door may be present according to the type 2 disapproval. Store (400) [su ton tracking data of the patient, the patient's upper position change of cartilage, including any exercise information and other movement of the patient's upper joint angle and motion speed data and/or information can be stored. Figure 2 shows a height neck [thu [su ton tracking data acquisition by the sensor also describe surface are disclosed. Embodiment of the upper limb is articulated to a tracking device (10) of height neck [thu sensor section (100) is 3 (not shown) through d depth sensor and captures the body of a patient, to obtain pixel scan of a patient upper joint [su ton tracking data can be mapped into. Figure 3 shows a tracking method according to an embodiment of the present invention embodiment of the upper limb is also articulated the order shown are disclosed. Tracking method embodiment of the upper limb is articulated to a patient's height neck [thu sensor section (100) obtaining tracking data by using the [su ton (S21), height neck [thu sensor section (100) receiving a patient [su ton tracking data (S22), [su ton tracking data (S23) tracking a change in position of the upper joint of the patient on the basis, exercise information including patient movement of upper joint angle and motion speed measuring (S25) and upper joint exercise information of a patient comprising outputting on a screen can be operates (S27). Height neck [thu [su ton tracking data is sensor section (100) which can be measured change line of the patient's body structure [su ton [su ton body structure of each joint is disposed around the position of the extended direction information acquired behind the skeleton motion and the data on the vectored integrating a device substrate. [Su ton tracking data the patient on the basis of the change in position of upper joint (S23), the patient data [su ton of cartilage 3 dimensional coordinate value to each upper maps, each upper articulated movement path between embodiment, can be constructed as a direction of rotation. At this time, [...], shoulder joint, the elbow joint, wrist joint and finger articulation angle part at the position kinematic stores the path portion (400) can be stored. The upper limb joint angle and motion speed exercise information including patient movement of measuring in (S25), the motion of each upper joint between the change of time and simultaneously by matching upper joint embodiment movement of angle and motion speed can be measured simultaneously. In the embodiment according to embodiment of the present invention is articulated to the other tracking method [su ton tracking data of the upper limb is detecting an operation of a patient by at least one upper predetermined the patient on the basis of cartilage (s24) or the tracking of changes in position of a disclosure further includes terminating the (s26) can be. For example, patient is hit twice grasp pin take predetermined action operation, a breast forward evaporates rapidly and spreading operation, but the number is not one device receives eternity accomplishes a pre-set. Figure 4 shows a patient movement of upper limb joint angle and motion speed exercise information including also describe surface measuring method are disclosed. Movement of upper limb joint angle and motion speed measuring upper joint can be based on a particular patient. Based on the rotation of the rotational angle when the humerus shoulder joint can be measures the direction, when the elbow joint measures the direction based on the rotation of the rotational angle can be vertebrae, wrist joint and eliminates possibility muscle can be based on measures the direction when rotation angle of the rotary, knuckled when rotation angle can be based on water and eliminates the rotation measures the direction. The elbow joint is about 2000 described in Figure 4. Number control unit (200) (t1) movement of any point in the elbow joint angle (θ1 ) And motion speed can be exercise information including receiving. Number control unit (200) at any point of time in the elbow joint (t2) other patient movement of angle (θ2 ) And motion speed can be measuring. In addition, the upper limb joint 3 dimensional position coordinates value computed using exercise information of each of the upper limb of cartilage may be filled. Number control unit (200) at any point in the elbow joint of 3 dimensional position coordinates value (t1) (x1 , Y1 , Z1 ) Can be obtain. Number control unit (200) at any point of time in the elbow joint of 3 dimensional position coordinates value (t2) other (x2 , Y2 , Z2 ) Can be calculated. Number control unit (200) in 3 dimensional position coordinates value (t1, t2) amount of any point of the pulse of a patient by measuring movement of each upper joint angle and motion speed can be. Or, at specific point calculator calculates motion angle and motion speed can be. The elbow joint of the upper limb of a patient other than patient each joint (shoulder joint, wrist joint and a finger joint) the same method also movement angle and motion speed can be calculated. Figure 5 shows a change in position of the upper limb of a patient by detecting patient also take predetermined action ending an account for the tracking of disclosure or joint surface are disclosed. A change in position of the upper limb joint tracking of disclosure or terminate patient take predetermined action for the hit twice grasp plan operation, a breast forward evaporates rapidly and spreading operation, but eternity accomplishes a pre-set device receives, the number is not one. Take predetermined action is detected the patient number control unit (200) at least one upper tracking of changes in position of a patient can be disclosure of cartilage. In addition, patient take predetermined action is detected the number control unit (200) of the upper limb of the tracking of changes in position of a patient of cartilage can be finished in the disclosed. The tracking of changes in position of a patient's upper end the motion of each other disclosure of cartilage operations can be identical or different. With reference to the attached drawing but more of the present invention in the embodiment described, the present invention is provided to its technical idea or person with skill in the art in the present invention is essential features without changing other specific embodiment can form can be understand are disclosed. In the embodiment described above the exemplary non-limiting all sides are understood to which must substrate. 10: Embodiment of the upper limb is articulated tracking device 100: Height neck [thu sensor section 200: Number control unit 300: Display unit 400: Store The present invention relates to an apparatus and a method for tracking a motion of an upper limb joint in real time. According to an embodiment of the present invention, the apparatus for tracking a motion of an upper limb joint in real time comprises: a Kinect sensor unit to acquire skeleton tracking data of a patient; a control unit to receive the skeleton tracking data of the patient from the Kinect sensor unit, track a position change of at least one upper limb joint of the patient based on the skeleton tracking data, and use the position change of at least one upper limb joint of the patient to measure motion information including a motion angle and a motion speed of at least one upper limb joint of the patient; and a display unit to output the motion information of at least one upper limb joint of the patient on a screen. COPYRIGHT KIPO 2017 Obtaining patient height neck [thu [su ton tracking data sensor section; said patient height neck [thu [su ton receives tracking data from said sensor, said at least one upper [su ton tracking data and tracking changes in position of the patient on the basis of cartilage, said patient using said at least one upper joint change in position of the at least one upper joint exercise information including patient movement of angle and motion speed measuring number control unit; and said at least one upper joint exercise information of a patient screen output on display part including the embodiment is characterized in that the upper limb is articulated to a tracking device. According to Claim 1, said number the fishermen, said detecting said predetermined action based on patient [su ton tracking data, said predetermined action corresponding to said at least one upper patient tracking of changes in position of a patient characterized disclosure of cartilage or an upper ending an articulated tracking device. Method as implemented by computer, sensor section height neck [thu [su ton of obtaining tracking data of the patient; said patient based on said change in position of the at least one upper joint [su ton tracking data tracking a; said at least one patient by using variations in said at least one upper joint upper position of motion of the exercise information including patient joint angle and motion speed measuring; and said at least one upper joint exercise information of a patient on a screen including the embodiment of the upper limb is articulated to a tracking method is characterized by the switch. According to Claim 3, said detecting said predetermined action based on patient [su ton tracking data, said predetermined action corresponding to said at least one upper patient tracking of changes in position of a patient disclosure of cartilage or further including terminating the embodiment is characterized in that the upper limb is articulated to a tracking method.